Este proyecto, titulado "Desarrollo de un robot hexápodo", consiste en el desarrollo íntegro del diseño y construcción de un robot móvil artrópodo. Para desarrollar el prototipo, se ha inspirado en un formícido llamado "Messor SP".
Para poder realizar dicho diseño, se ha realizado un estudio previo de biomimetismo. Posteriormente mediante el análisis de ecuaciones de cinemática (con trigonometría y matrices de Denavit-Hatenberg). Una vez obtenido la simulación de los movimientos se ha desarrollado el modelado mecánico y luego su fabricación.
Este proyecto se lo he dedicado a las personas que siempre han confiado en mi, en especial a mi madre y mi padre, el cual pudo ver como evolucionaba hasta sus últimos días.

Figura 1: Autor junto con el robot.

Figura 2: "Messor Sp".
El estudio de cinemática contemplan las ecuaciones de movimiento del robot, permitiendo el control de las mismas y la forma de caminar sobre el terreno irregular.
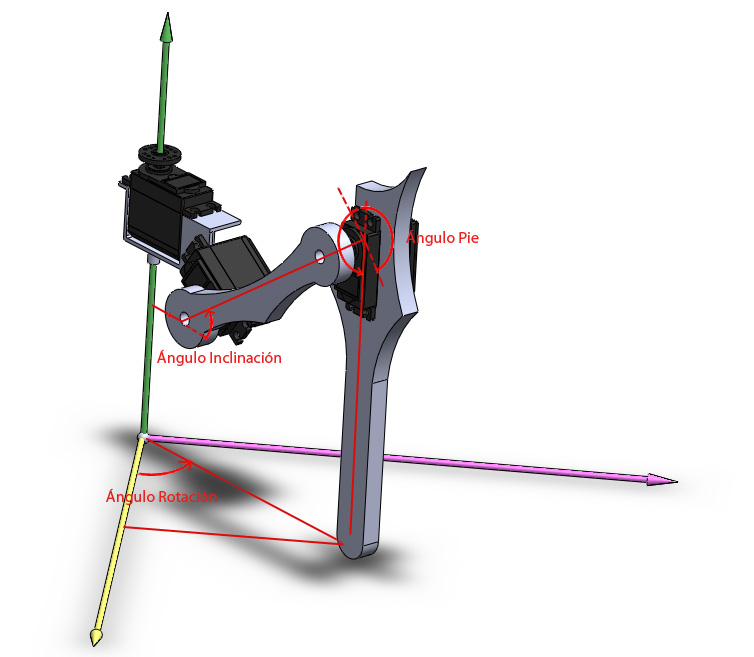
Figura 2: Referencias de ángulos.
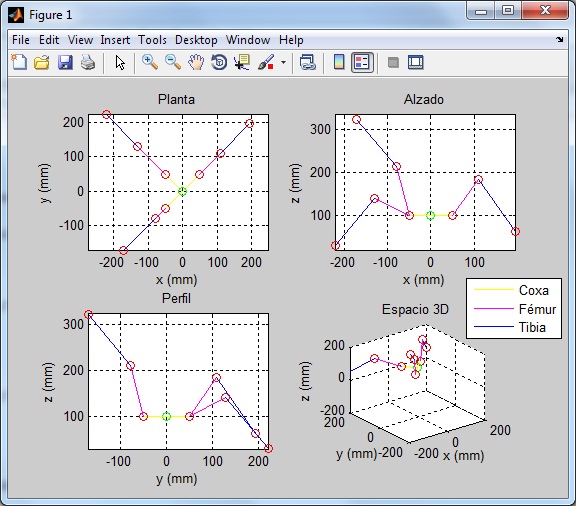
Figura 3: Simulación de la cinemática mediante MatLab.
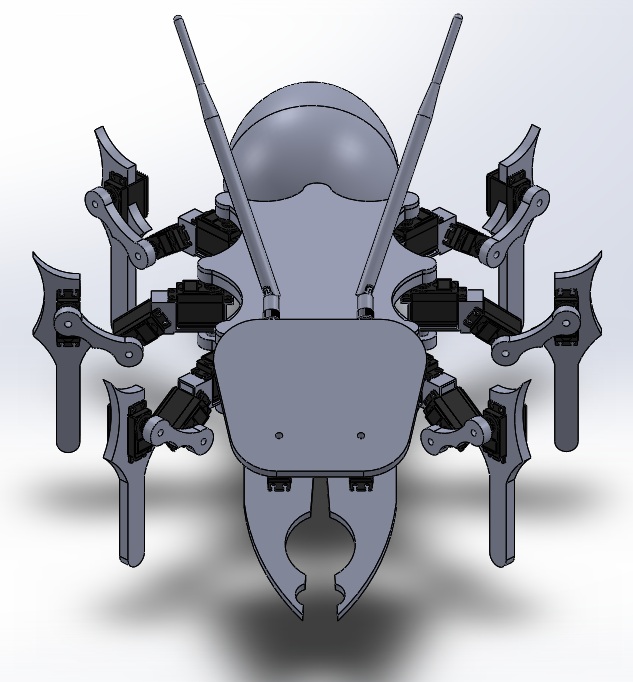
Figura 4: Modelo 3D del robot.

Figura 5: Imágenes del proceso de construcción.
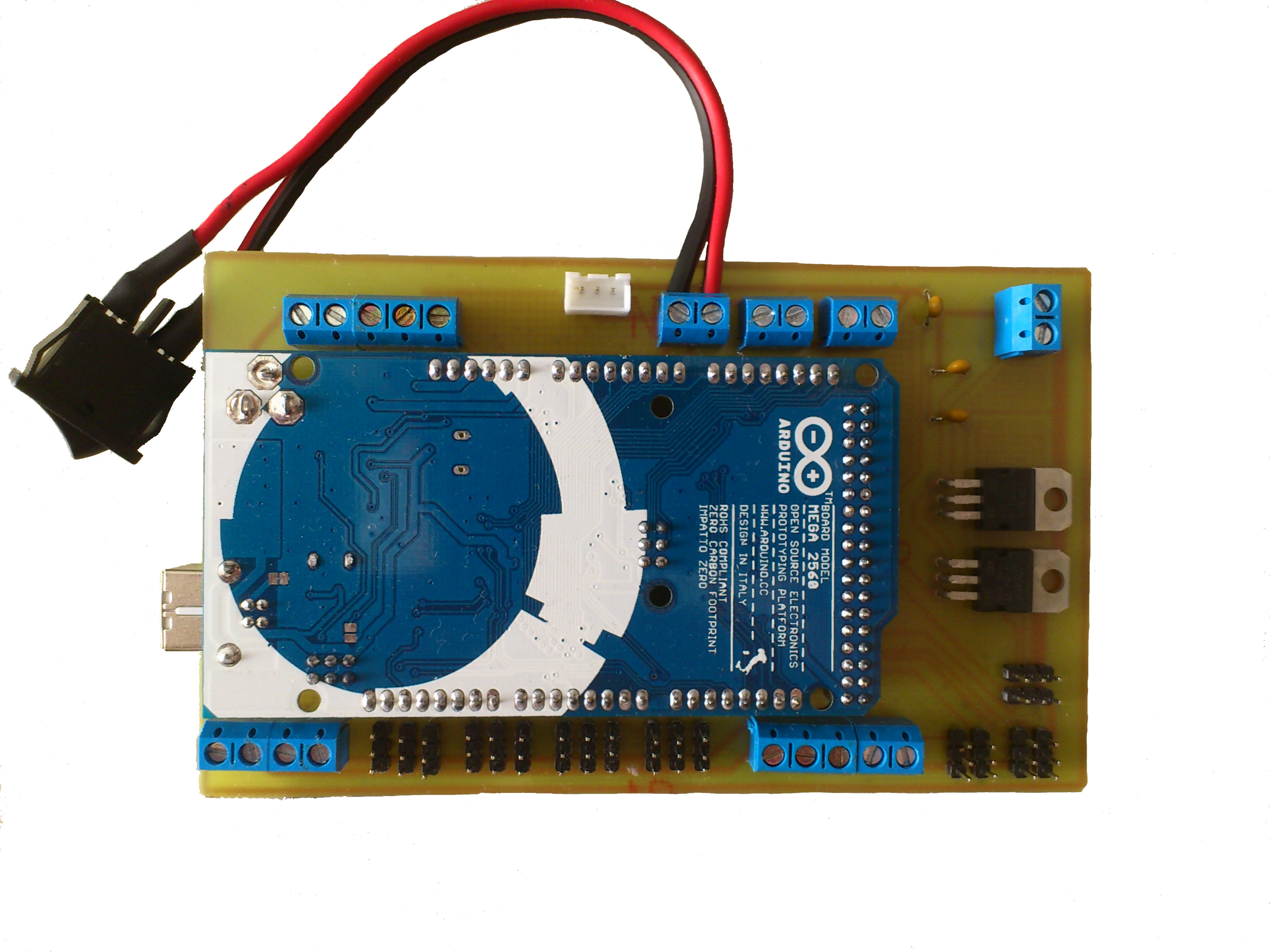
Figura 6: Placa Principal.
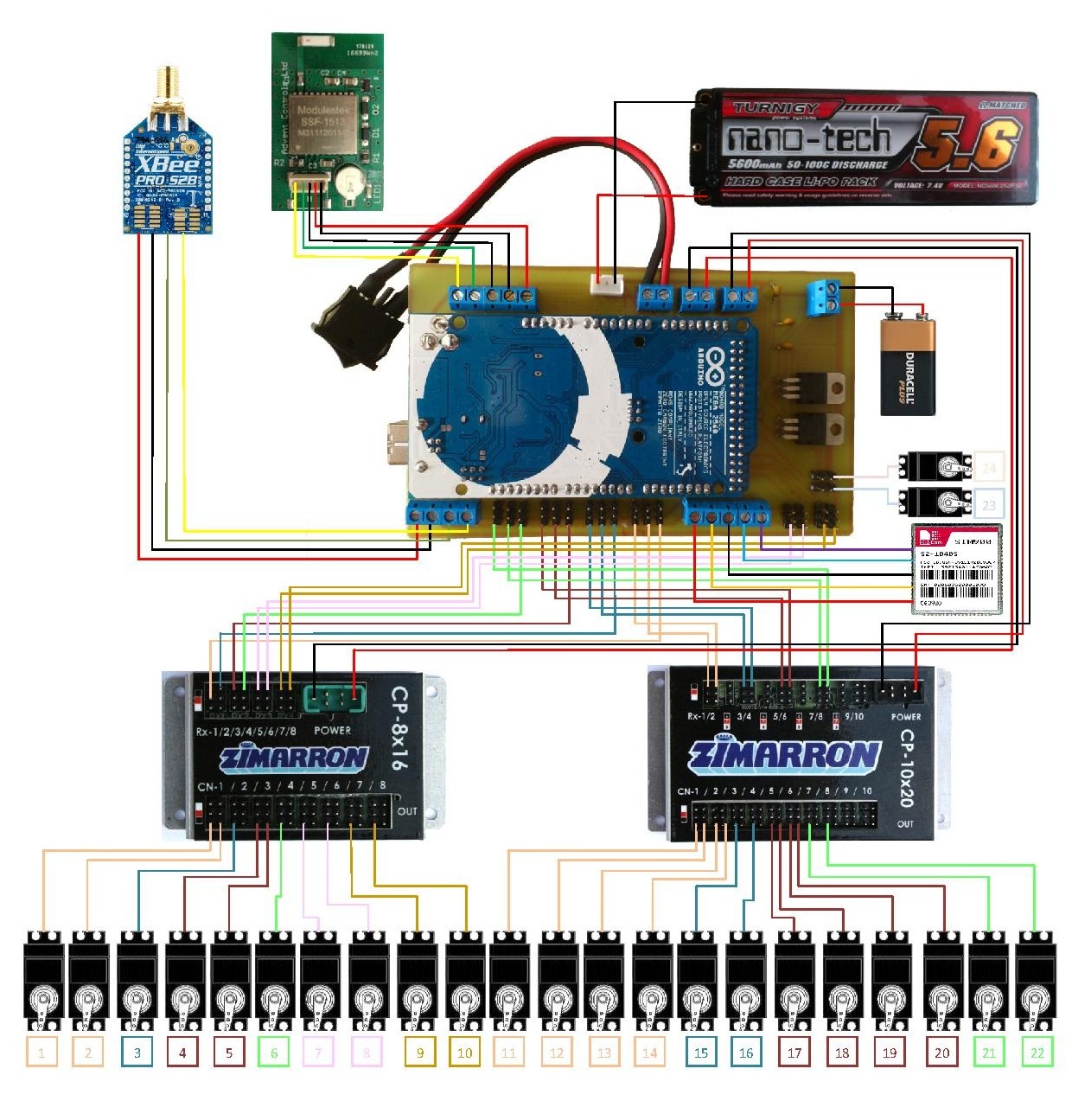
Figura 7: Esquema eléctrico del robot.
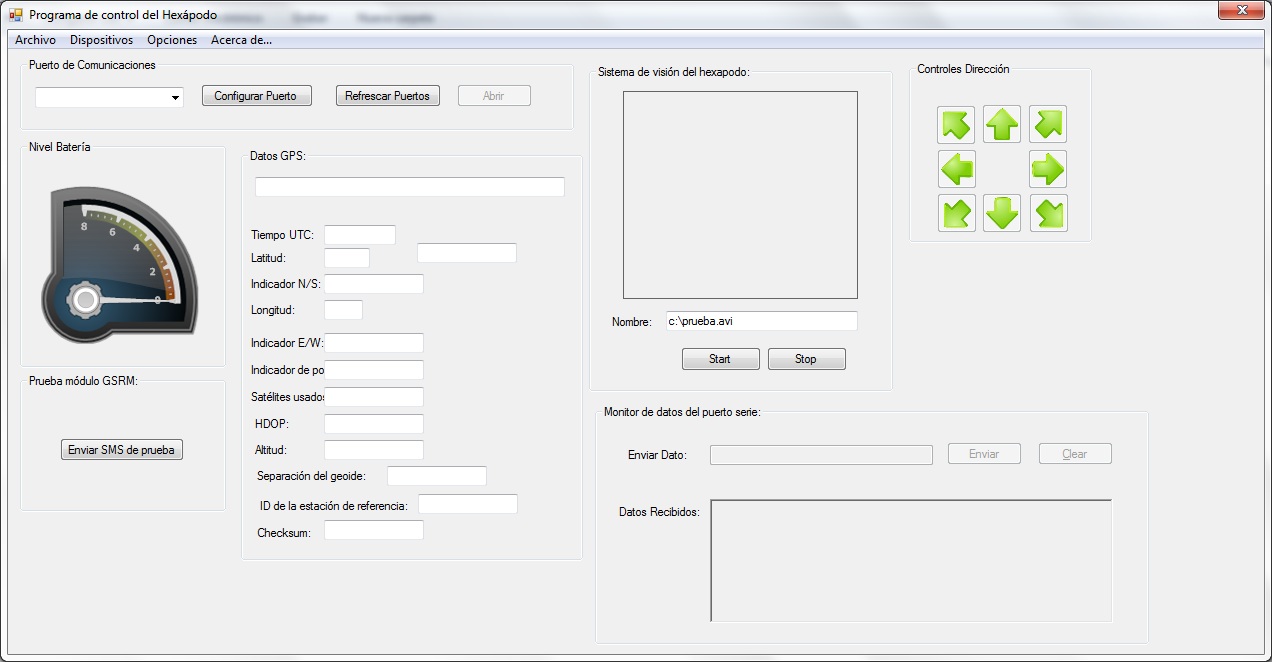
Figura 8: Interfaz del programa de control.
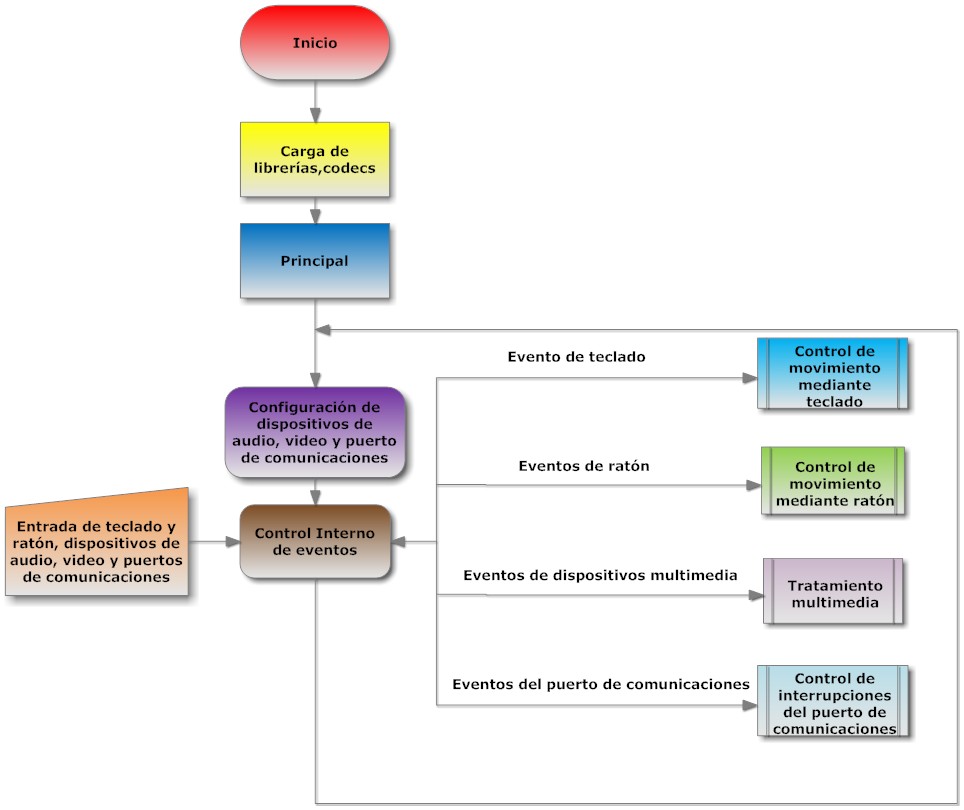
Figura 9: Diagrama de flujo del funcionamiento del programa de control.